
Surgical Robotics System Integration and Teleoperation
Worcester Polytechnic Institute | Worcester, MA | 2022
Overview
Research on integrating various sensing modalities and control interfaces with the da Vinci Research Kit.
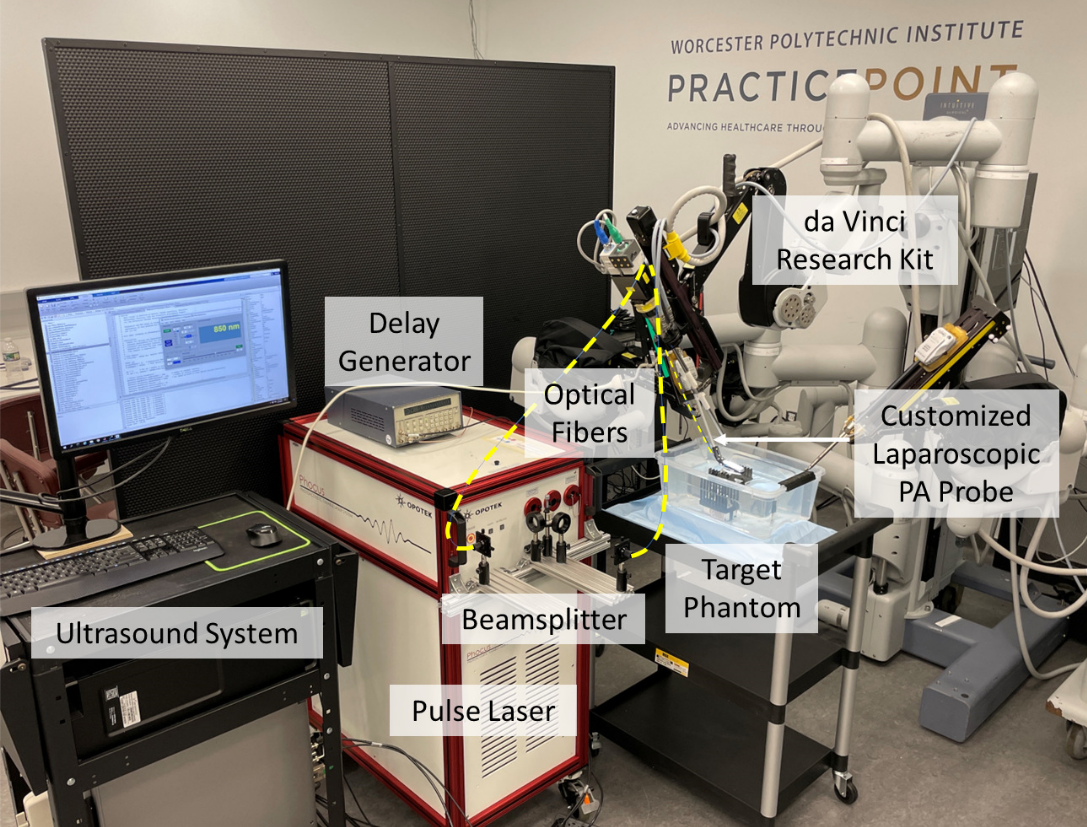
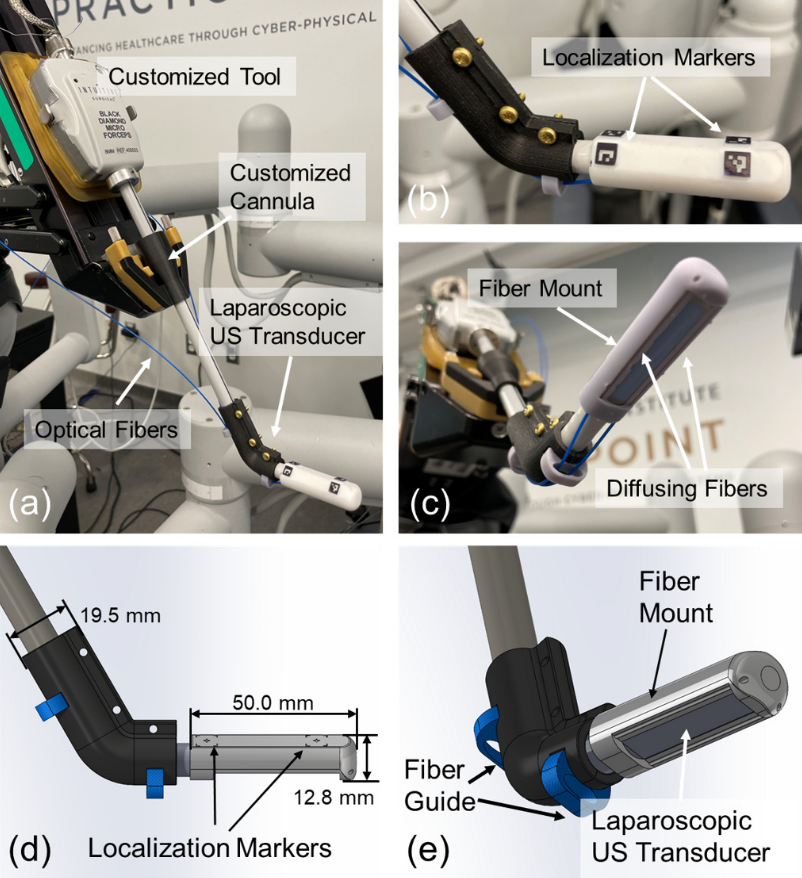
- photo-acoustic probes integration with dVRK PSM:
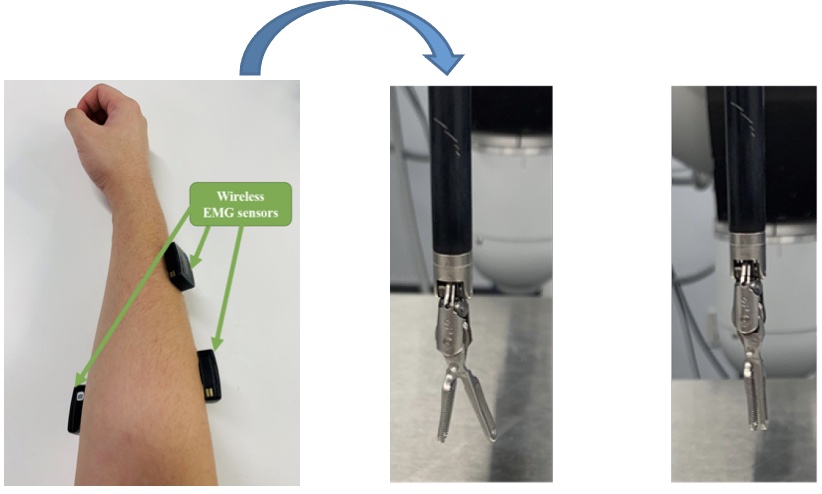
- sEMG biofeedback for teleoperation
Key Contributions
- Developed a novel teleoperation approach using sEMG biofeedback signals
- Integrated a photo-acoustic probe with a dVRK instrument and installed on the dVRK Patient Side Manipulator (PSM)
- Constructed the kinematic model for the custom instrument to enable teleoperation and script-based control
- Developed the synchronized autonomous scanning system using ROS communication for image overlay
- Enabled teleoperation for dVRK PSMs with multiple common haptic devices, such as Phantom Omni and Razer Hydra controller, subsequently utilized in a dVRK-based AR measurement system
- Developed the teleoperation pipeline that enabled participants to remotely operate the dVRK PSM during WPI’s 2022 TouchTomorrow event.
© 2026 Jack (Haoying) Zhou. Website built and customized by Jack (Haoying) Zhou from the academicpages template. Please let me know if you notice any glitches.