
Surgical Robot Dynamic Model Identification and Control
Johns Hopkins University | Baltimore, MD | 2022-2026
Overview
This research develops novel
- Dynamic model identification and gravity compensation (shown) for dVRK-Si (the next-generation da Vinci Research Kit) Patient Side Manipulator (PSM) using convex optimization

- a novel force estimation method using a model-based and learning-based hybrid approach for trocar interaction.
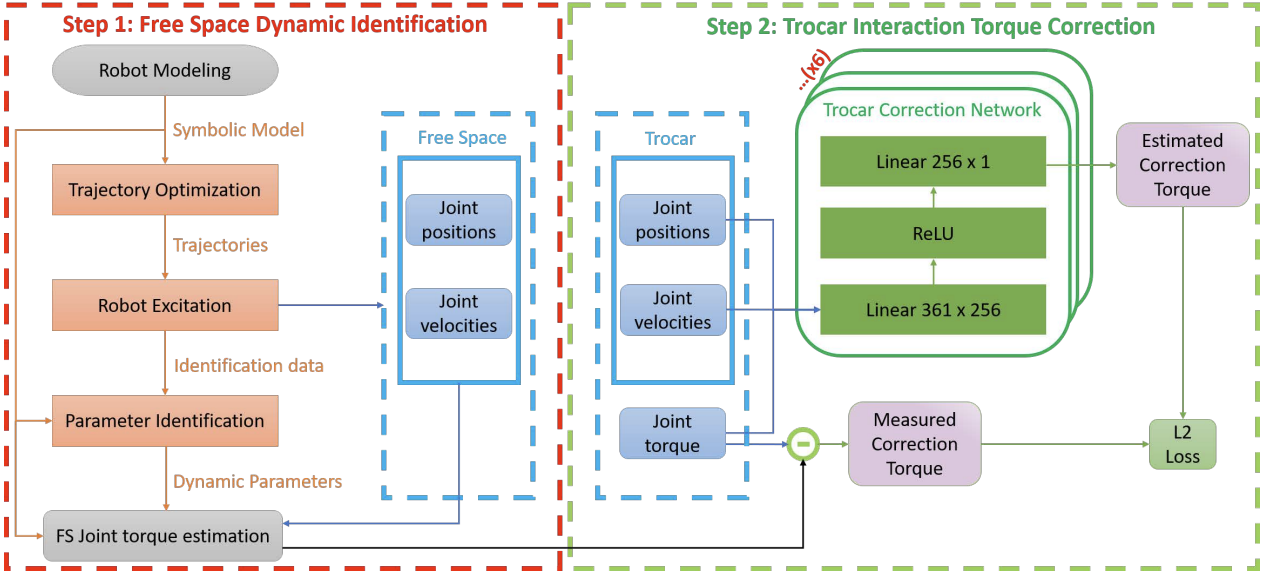
Key Contributions
- Develop a novel force estimation approach for the robot under trocar interaction using a hybrid model combined the model-based approach and the learning-based approach, reducing the estimation errors by 30%
- Implement the dynamic model identification and gravity compensation of dVRK Classic/Si Patient Side Manipulator using convex optimization approaches, reducing the static control errors by 73%
© 2026 Jack (Haoying) Zhou. Website built and customized by Jack (Haoying) Zhou from the academicpages template. Please let me know if you notice any glitches.