
Digital Twin for Suturing Scenes
Johns Hopkins University | Baltimore, MD | 2022-2026
Overview
Development of high-fidelity digital twin environments for surgical suturing scenes, utilized for NSF AccelNet Surgical Robotics Challenges.
Key Contributions
- Develop high-fidelity environments with realistic dynamic feedback for suturing execution on an open-source 3D simulation platform (AMBF), utilized for NSF AccelNet Surgical Robotics Challenges
- Scan the real-world suturing training phantoms using MRI and import the segmented 3D models into the simulation environment
- Build photorealistic dVRK surgical instrument simulation models, sharing the models with the dVRK community
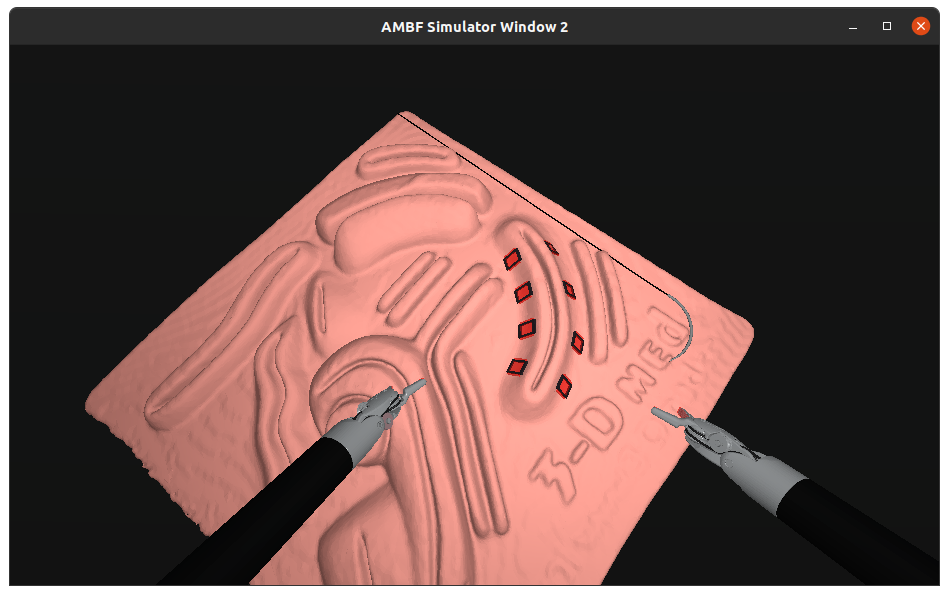
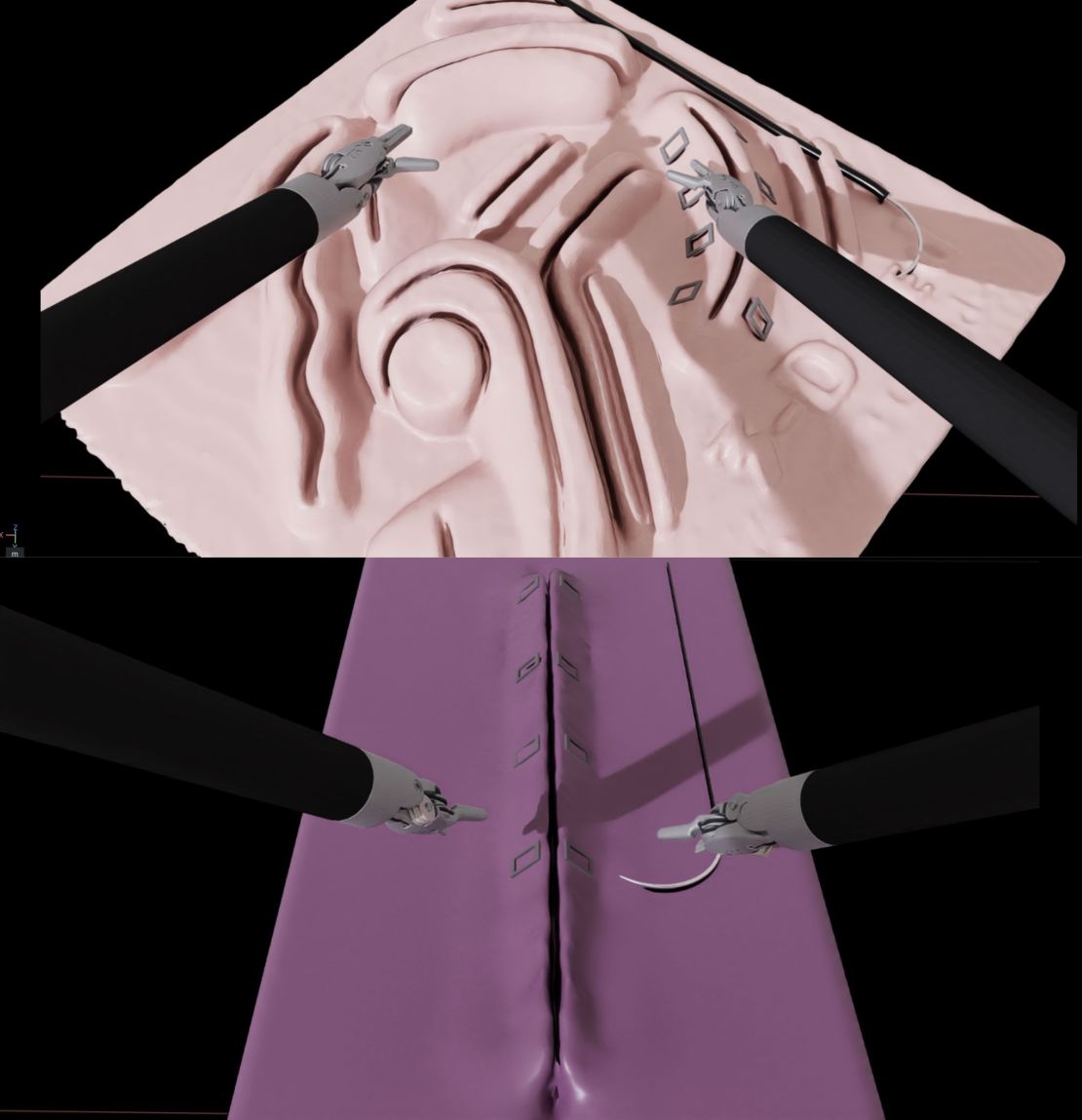
- Construct high-fidelity digital twin for suturing scenes in NVIDIA Omniverse Isaac Sim
- Develop an autonomous synthetic data generation pipeline using the high-fidelity simulation environment in the AMBF simulator
Simulation Scene Examples
© 2026 Jack (Haoying) Zhou. Website built and customized by Jack (Haoying) Zhou from the academicpages template. Please let me know if you notice any glitches.