
SurgSync: Time-Synchronized Multi-modal Data Collection Framework and Dataset for Surgical Robotics
Published in IEEE Intl. Conf. on Robotics and Automation (ICRA), 2026
Overview
This research represents Multi-Modal Time-Synchronized Data Collection and Post-Processing Framework for Surgical Robotics, along with datasets and AI-driven applications (stay tuned!).
Key Contributions
- Lead and manage 8-person cross-functional team, delivering IRB-compliant data collection and analysis that accelerated publication timeline and demo readiness
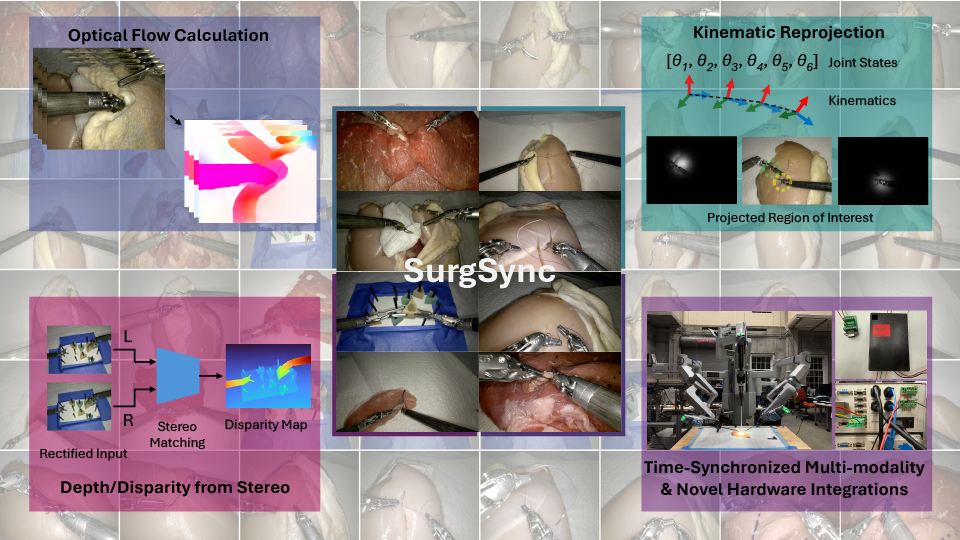
- Build time-synchronized (multi-modality sync time latency within 10ms) multi-modal data collection pipeline (vision + kinematics + sensor) and large (100+ instances) ex-vivo dataset
- Enable a novel kinematic projection approach and downstream optical flow/depth estimation using deep learning
- Design and implement a custom capacitive contact sensor to acquire the ground truth of tool-tissue contact
- Integrate a modern chip-on-tip endoscope with the dVRK seamlessly, enabling high-quality image data acquisition
- Design a novel data annotation application with graphic user interface (GUI) using PyQt for manual label annotations
- The data collection pipeline has been employed for efforts on Open-H-Embodiment
Future/Ongoing Work
- Investigate surgical robot tool-tissue contact detection using a multi-modal deep learning approach.
© 2026 Jack (Haoying) Zhou. Website built and customized by Jack (Haoying) Zhou from the academicpages template. Please let me know if you notice any glitches.