
Research
My research focuses on surgical robotics, with an emphasis on the da Vinci Research Kit (dVRK). I work on developing high-fidelity simulation environments, multi-modal data collection systems, dynamic model identification, and AI-driven perception and automation for surgical robotics applications.
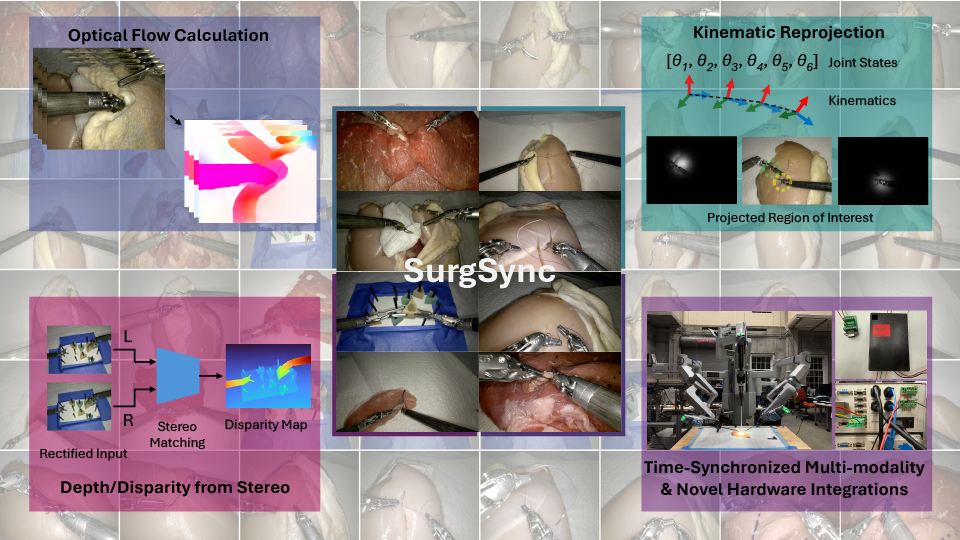
SurgSync: Time-Synchronized Multi-modal Data Collection Framework and Dataset for Surgical Robotics
Multi-Modal Time-Synchronized Data Collection and Post-Processing Framework for Surgical Robotics, along with datasets and AI-driven applications (stay tuned!)
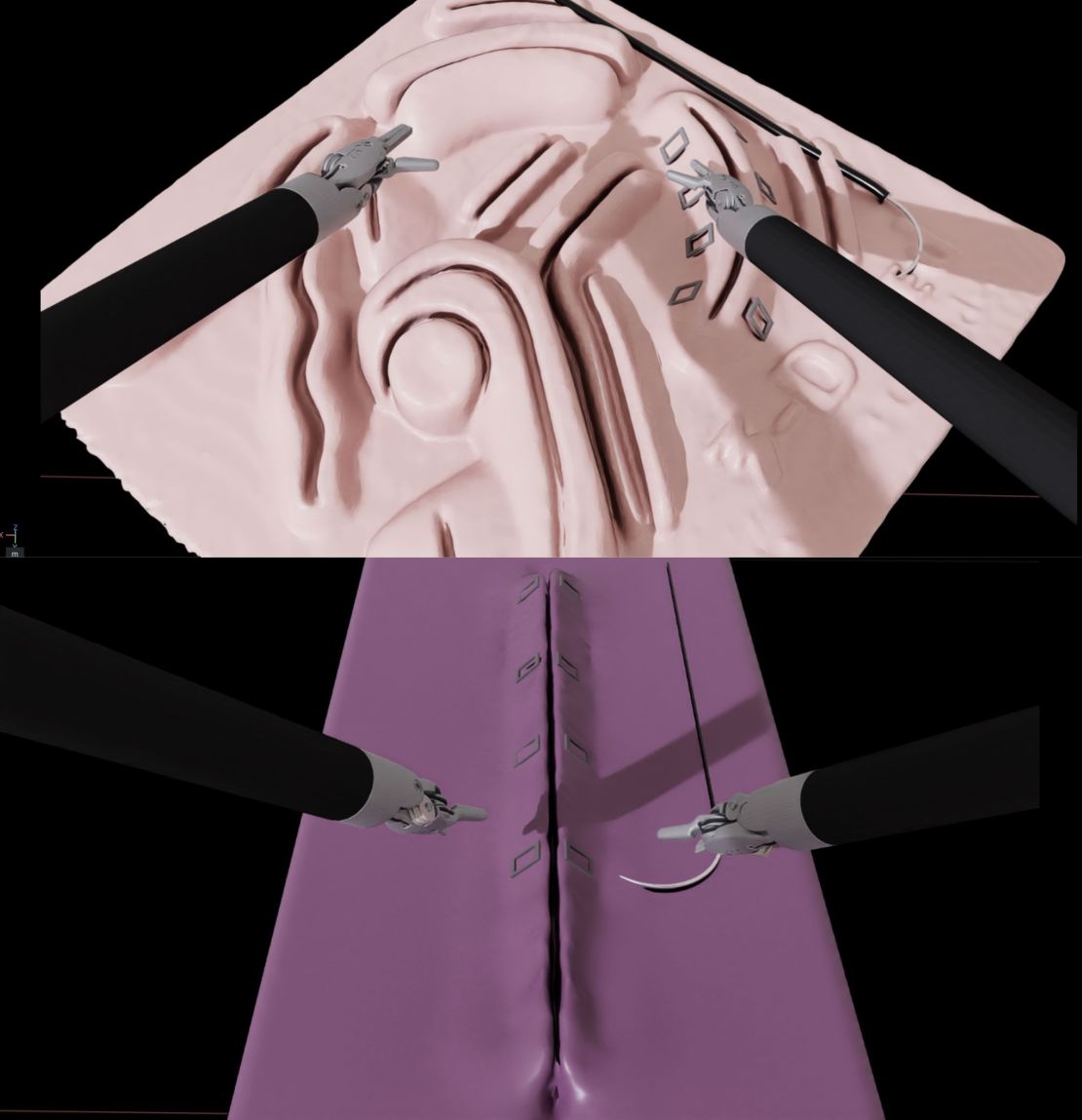
Digital Twin for Suturing Scenes
High-fidelity simulation environments for suturing execution on AMBF and NVIDIA Isaac Sim
Surgical Robot Dynamic Model Identification and Control
Dynamic model identification and gravity compensation (shown) for dVRK-Si PSM using convex optimization; upcoming journal paper is on the way, stay tuned! Develop a novel force estimation method using a modal-based and learning-based hybrid approach for trocar interaction.
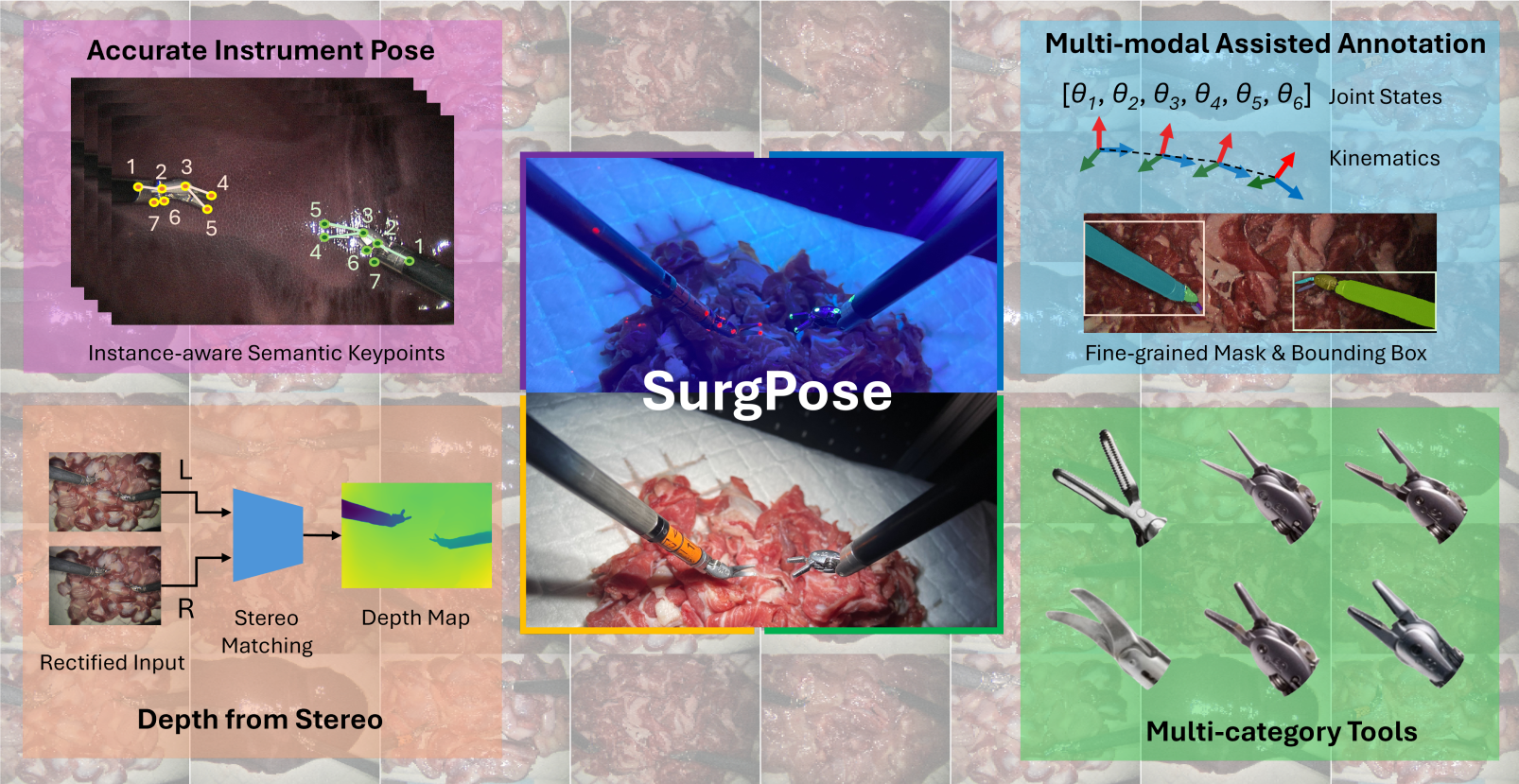
SurgPose: a Dataset for Articulated Robotic Surgical Tool Pose Estimation and Tracking
Dataset for surgical tool pose estimation and tracking, using fluorescent paints to annotate the keypoints of the tools.
Suturing Tasks Automation Based on Skills Learned from Demonstrations: A Simulation Study
Implementation of imitation learning algorithms for automating surgical suturing tasks in simulation
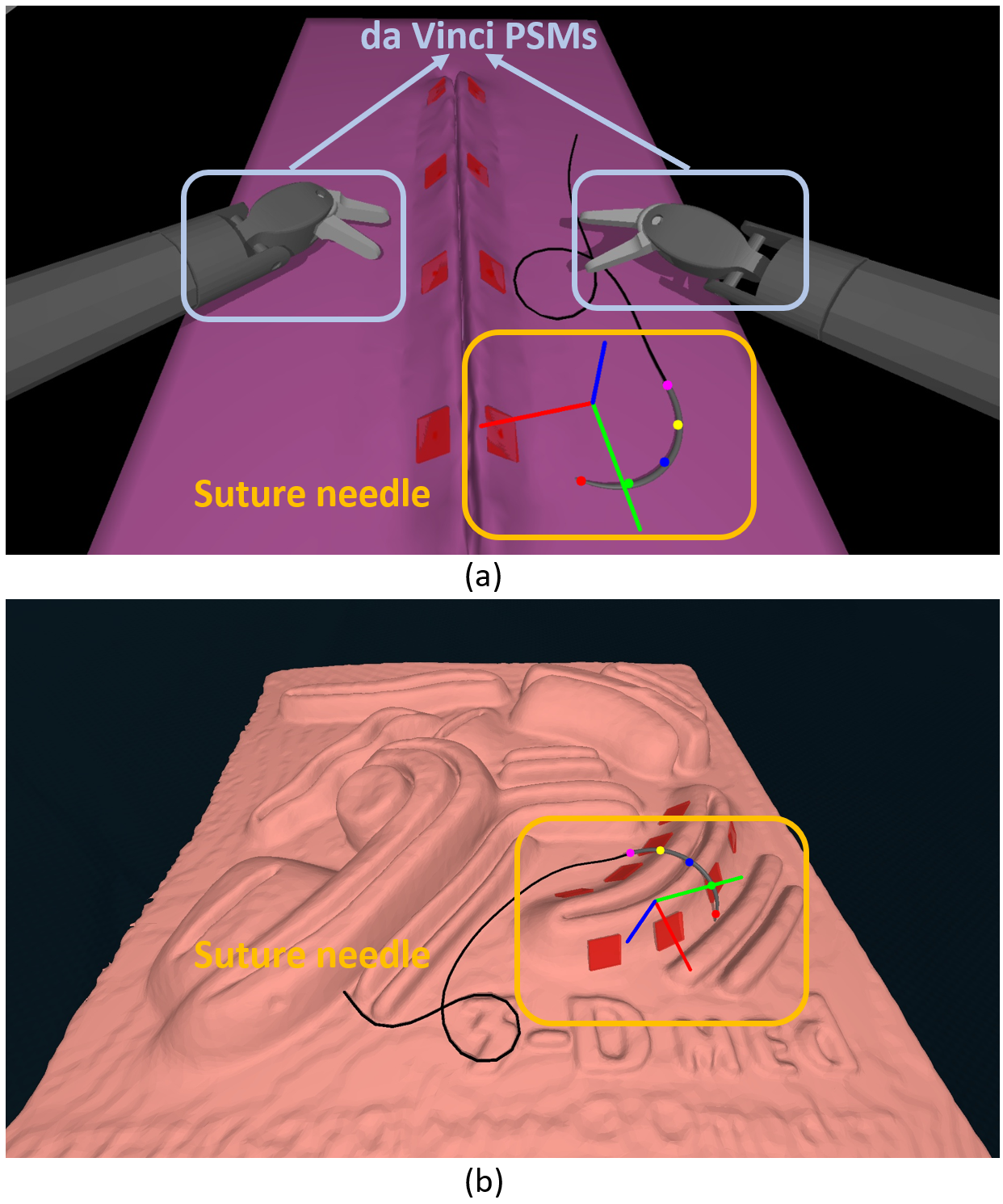
Suturing Needle Tracking and Pose Estimation in Simulation
Real-time markerless 6D pose estimation for suturing needle in simulation, achieving 1.4mm and 2.9 degrees median errors
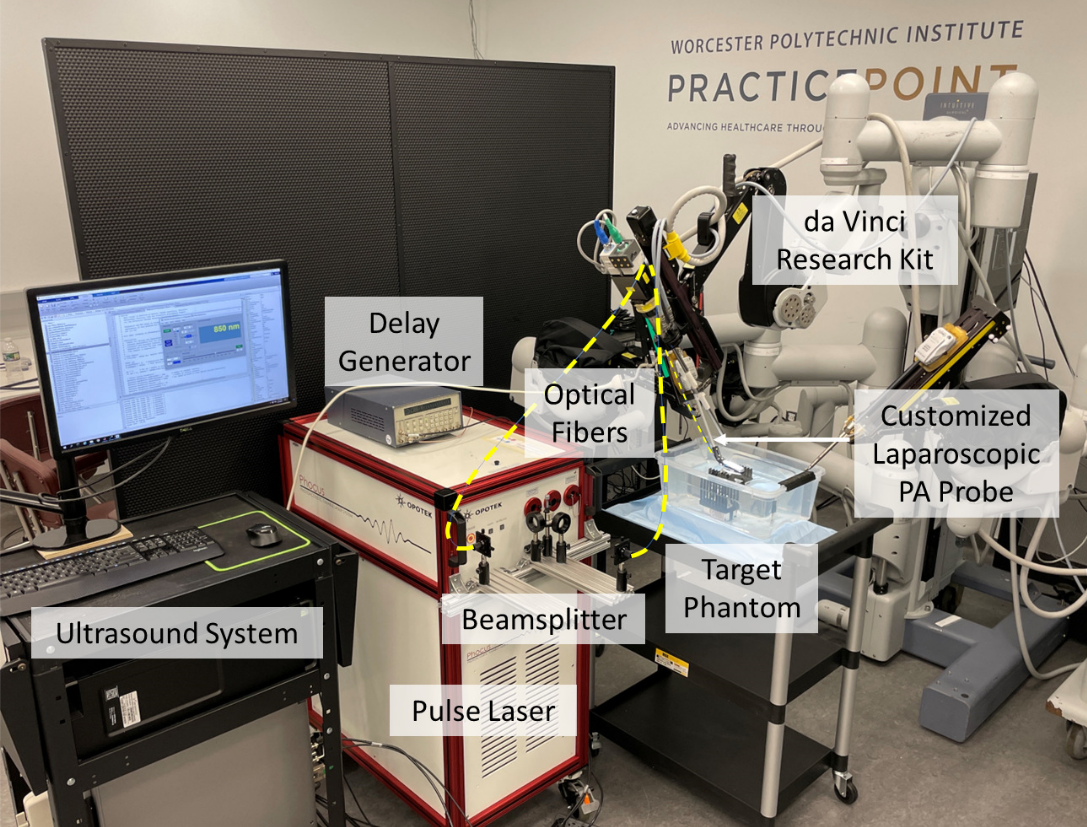
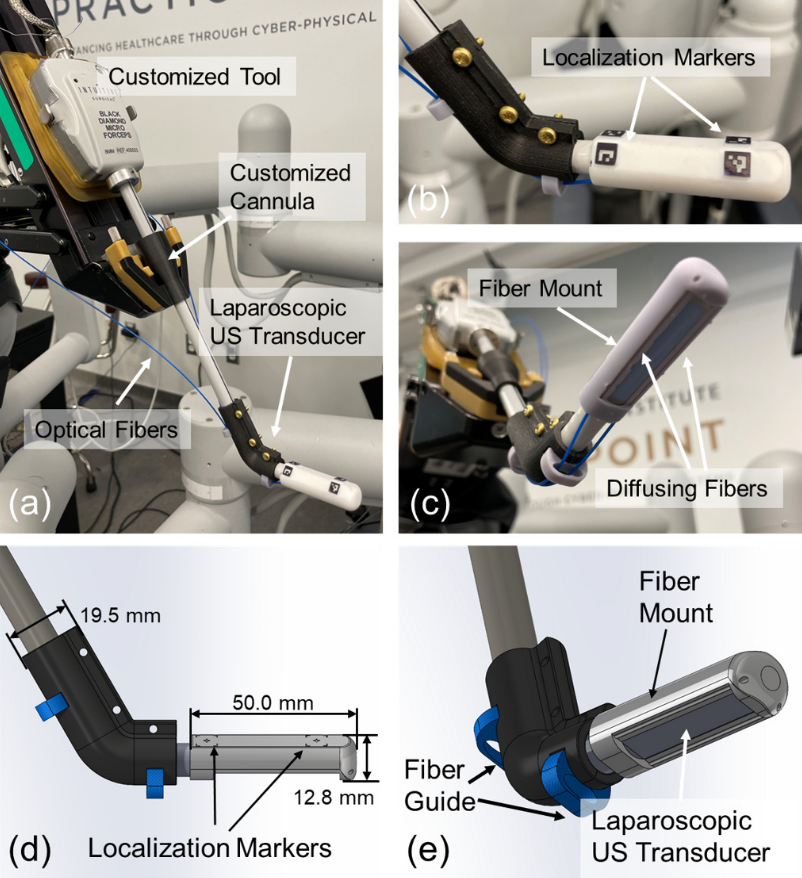
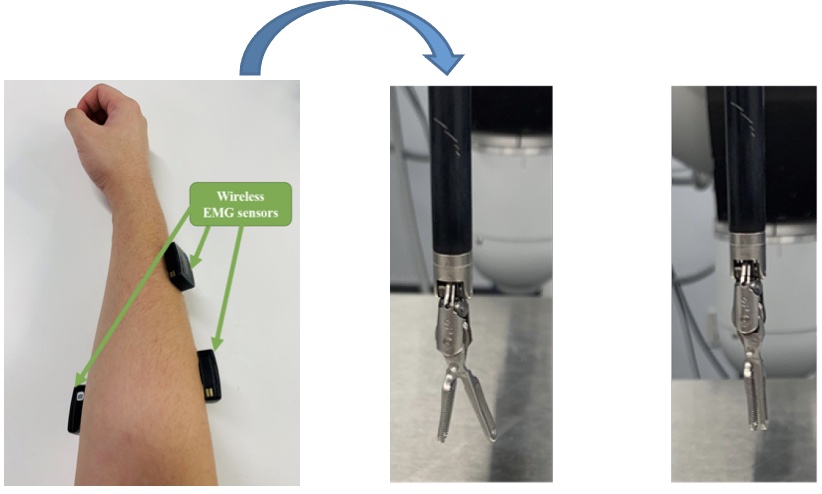
Surgical Robotics System Integration and Teleoperation
Integration of photo-acoustic probes, advanced teleoperation with sEMG biofeedback, and etc.
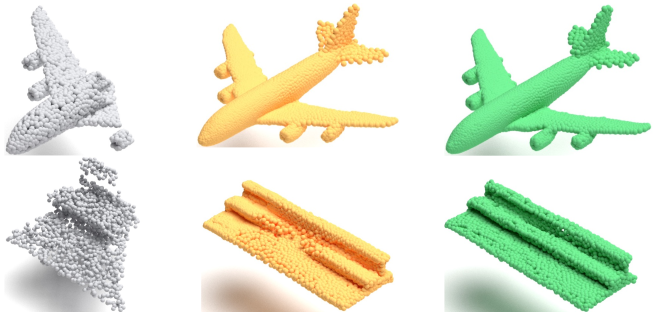
Loss Distillation via Gradient Matching for Point Cloud Completion with Weighted Chamfer Distance
Novel chamfer distance loss function achieving state-of-the-art results on benchmark datasets
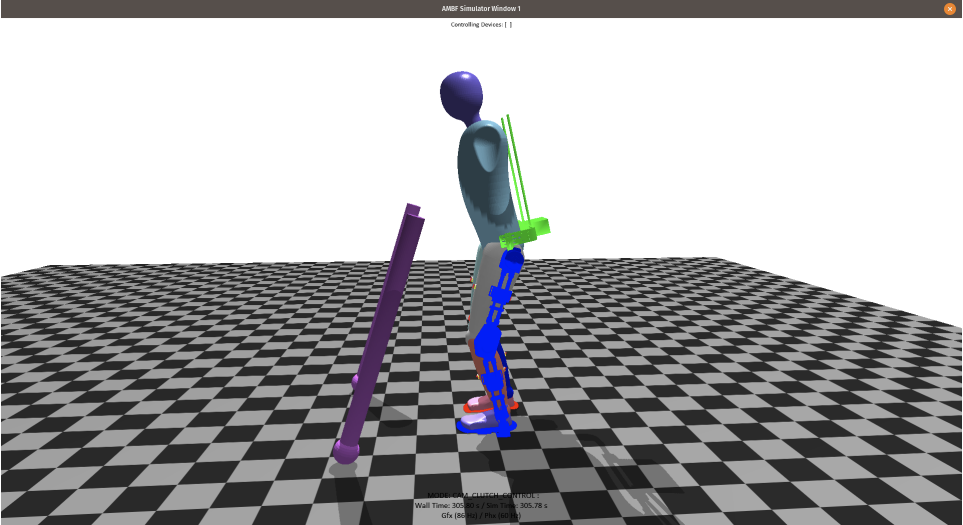
Control of a lower limb exoskeleton using Learning from Demonstration and an iterative Linear Quadratic Regulator Controller: A simulation study
Automated walking strategy using imitation learning and iLQR control
Imitation Learning with Dynamic Movement Primitives
Reach-to-grasp imitation learning for baxter robot in simulation (V-REP)
... more on my Google Scholar page or in the Publications page.