
Adaptive Robustness Control Design for UAV with ROS Gazebo
Worcester Polytechnic Institute | 2022
Overview
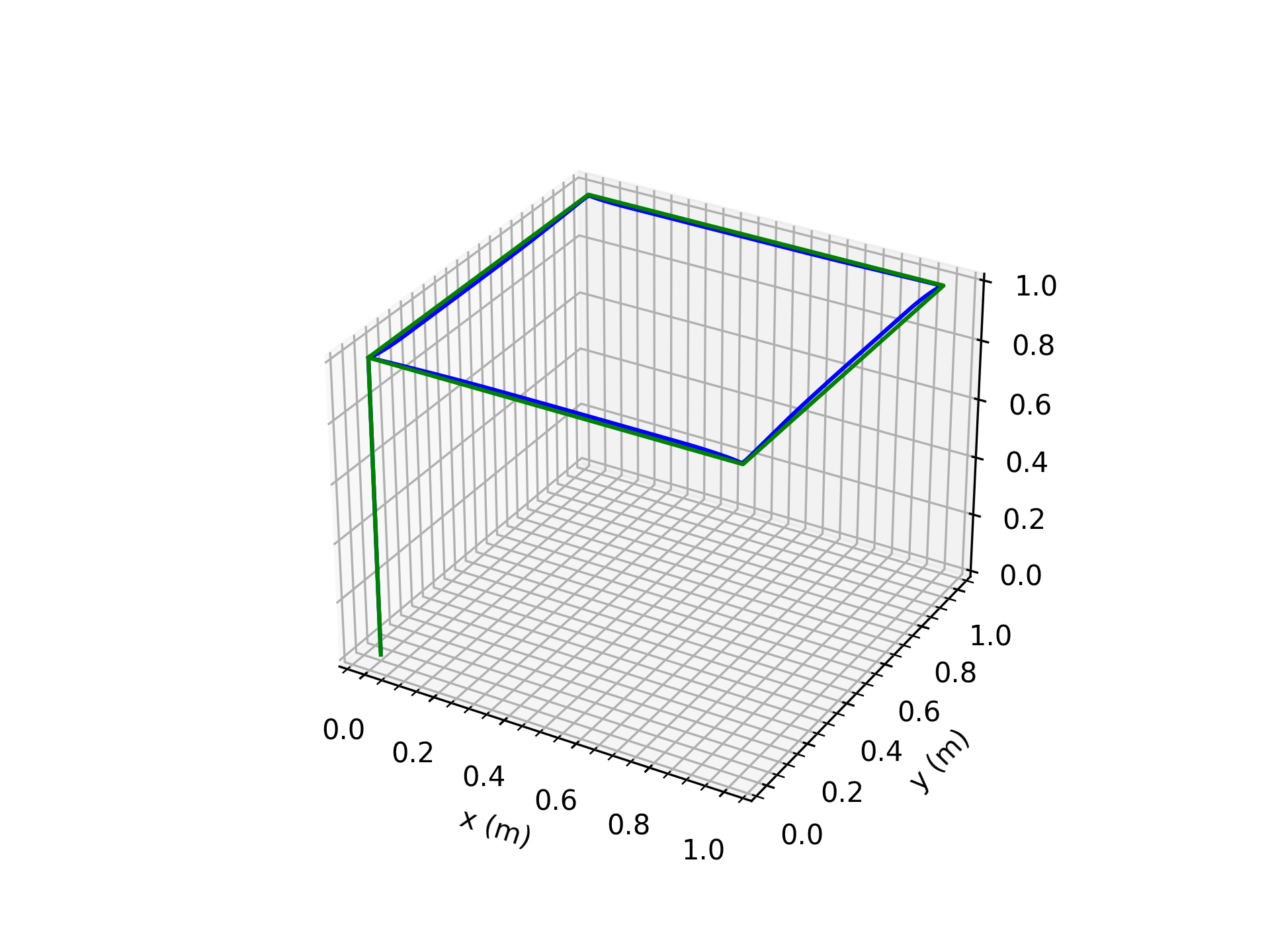
Course project focused on designing and implementing adaptive robust control strategies for Unmanned Aerial Vehicles (UAV) using ROS and Gazebo simulation environment.
Technical Details
- Designed adaptive control algorithms to handle model uncertainties and disturbances
- Implemented the controller in MATLAB and ROS with Gazebo simulation
- Validated control performance through extensive simulation testing
© 2026 Jack (Haoying) Zhou. Website built and customized by Jack (Haoying) Zhou from the academicpages template. Please let me know if you notice any glitches.