
Custom Capacitive Contact Sensor
Johns Hopkins University | 2025
Overview
Design and implementation of a custom capacitive contact sensor to acquire ground truth data for tool-tissue contact detection in surgical robotics research. More details will be shared later, stay tuned!

Technical Details
- Leverage Arduino microcontroller to implement the capacitive sensor
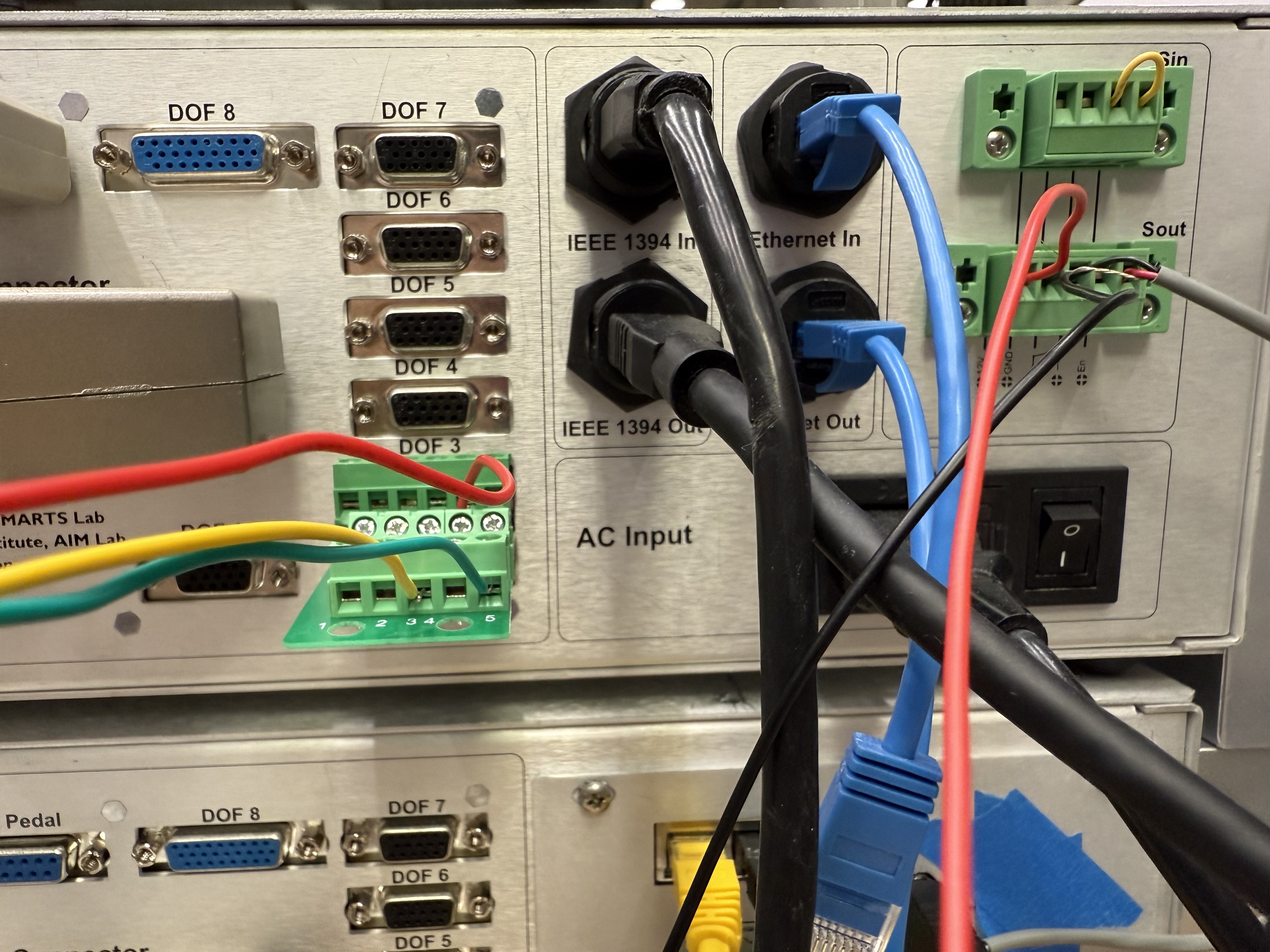
- Seamlessly integrated the sensor with the dVRK controller
- Implemented signal processing for contact detection
- Validated sensor performance with tissue phantoms
Integration with dVRK tools
This sensor is used to provide ground truth labels for tool-tissue contact detection.
More details will be added later. Stay tuned!

© 2026 Jack (Haoying) Zhou. Website built and customized by Jack (Haoying) Zhou from the academicpages template. Please let me know if you notice any glitches.